
今天分享的是:2025具身智能报告:具身智能从线虫转向复盘至行动导航,旗帜鲜明看好物理AI
报告共计:26页
具身智能迎来关键转折点:从“行动导航”迈向“物理AI”新纪元
近年来,人工智能的发展逐渐从虚拟世界走向物理实体,具身智能成为科技界瞩目的新方向。根据最新行业研究,具身智能正经历从“仿生智能”到“物理AI”的深刻转变。这一转变不仅关乎技术路径的突破,更将推动机器人从单一功能工具迈向具备通用交互能力的智能体。
生物智能五阶段揭示发展路径,模拟学习成为关键瓶颈
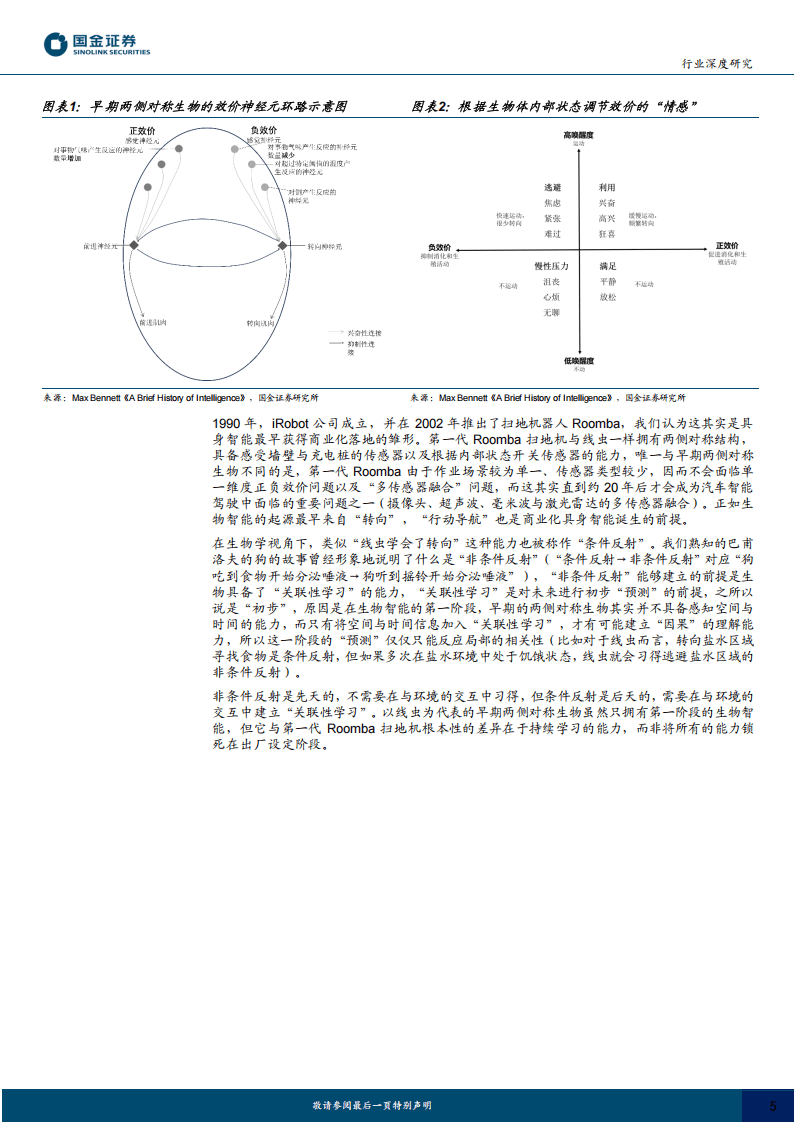
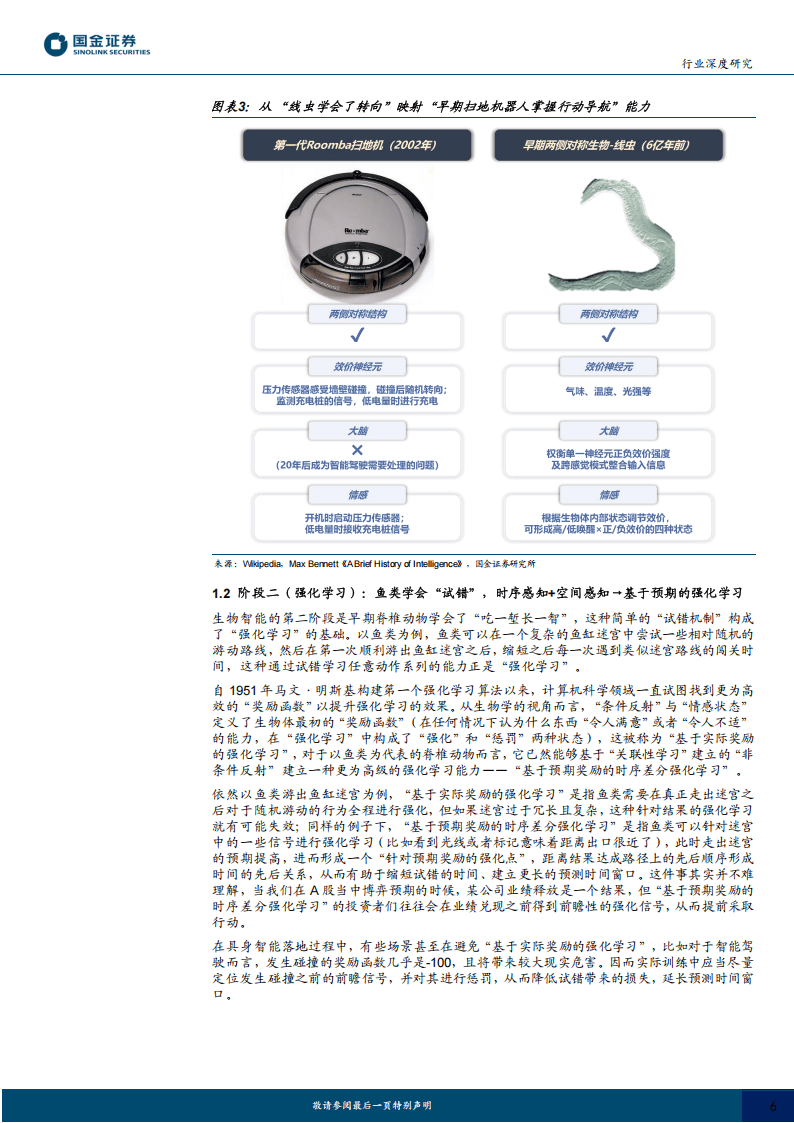
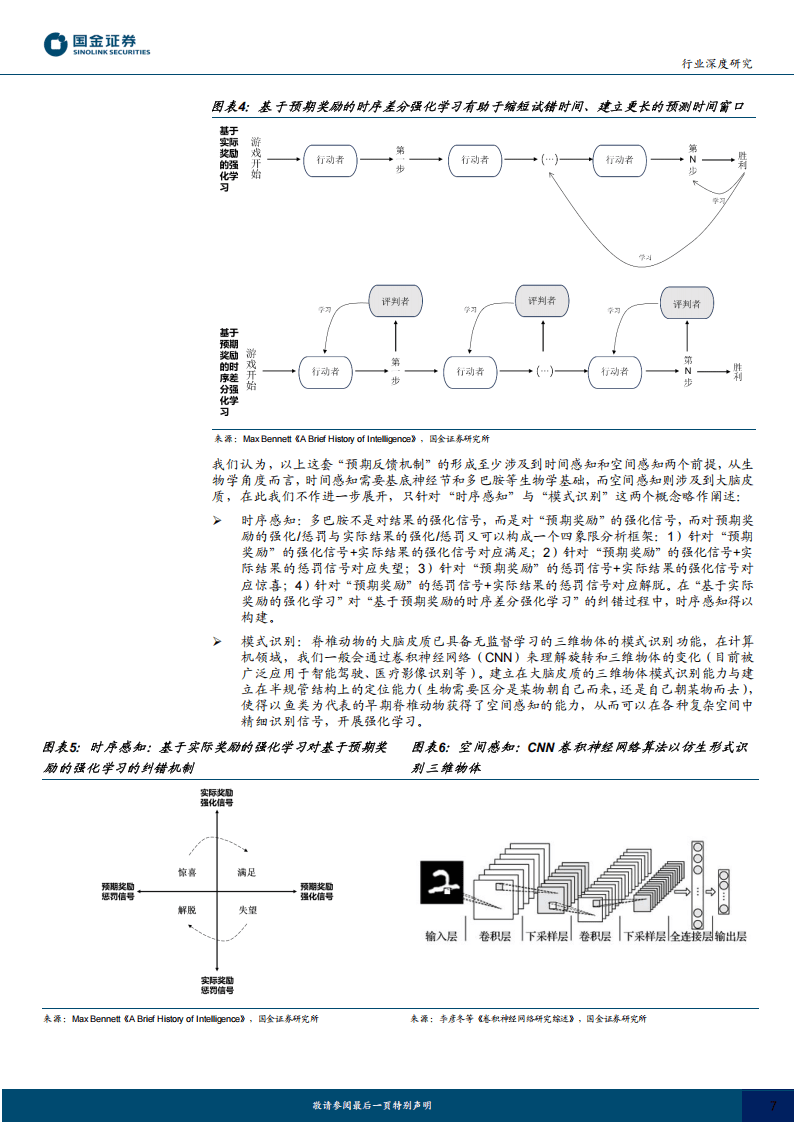
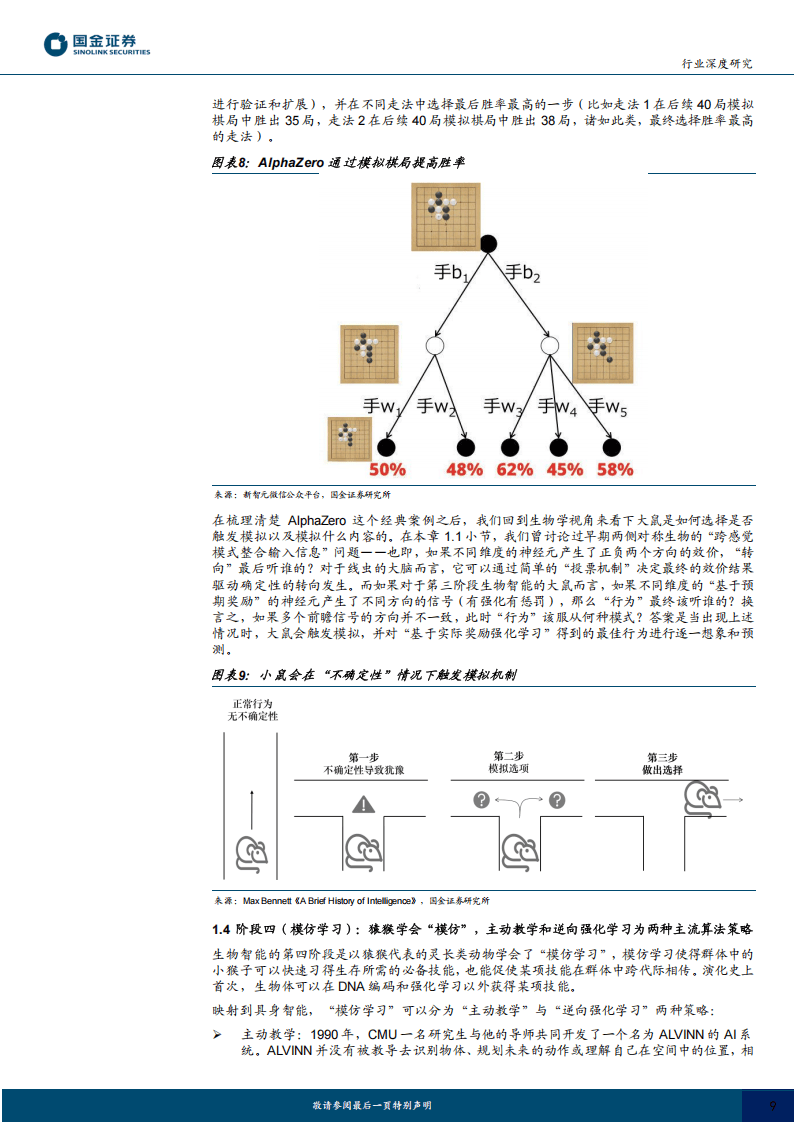
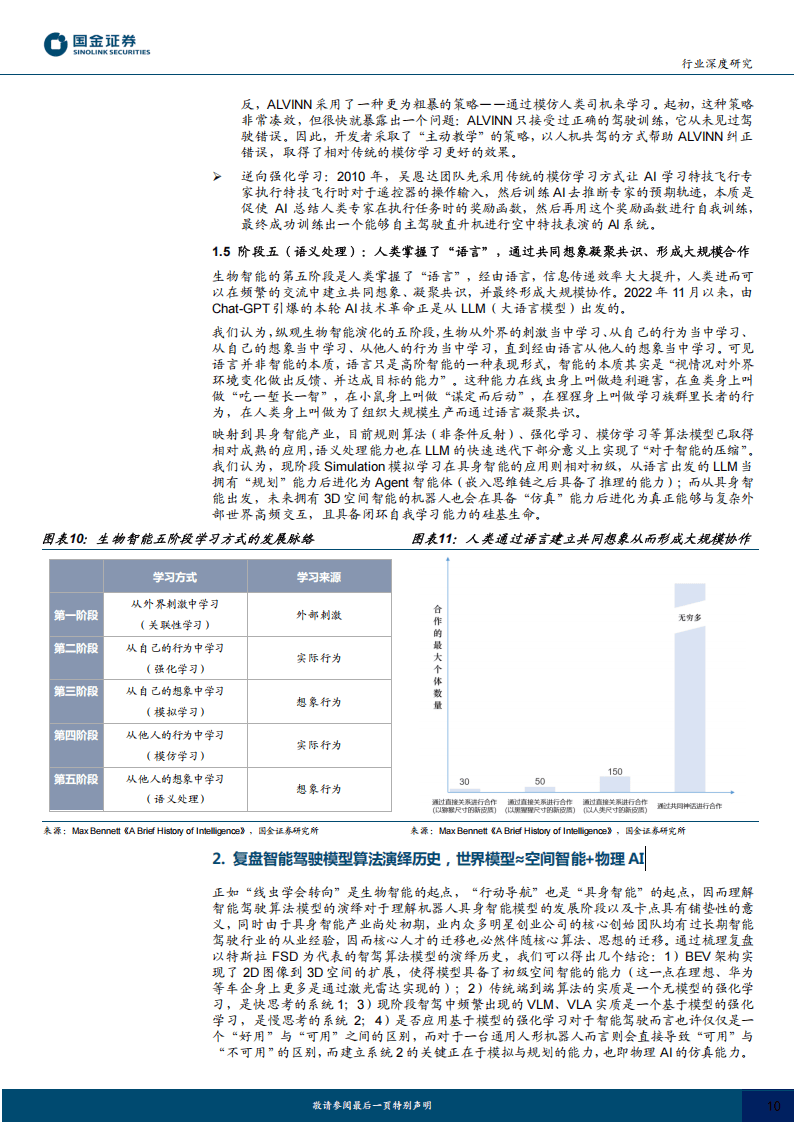
从生物演化的视角来看,智能的发展经历了五个阶段:从线虫的“关联性学习”到鱼类的“强化学习”,再到哺乳动物的“模拟学习”,以及灵长类的“模仿学习”,最终到人类的“语义处理”。目前,具身智能在规划、强化学习与模仿学习方面已取得显著进展,但在第三阶段——“模拟学习”上仍存在明显短板。模拟学习要求机器能够像小鼠一样,在行动前通过“脑海预演”评估不同行为的后果,从而做出最优选择。这一能力的缺失,限制了机器人在复杂环境中的自主性与适应性。
智能驾驶技术为具身智能铺路,端到端模型推动认知升级
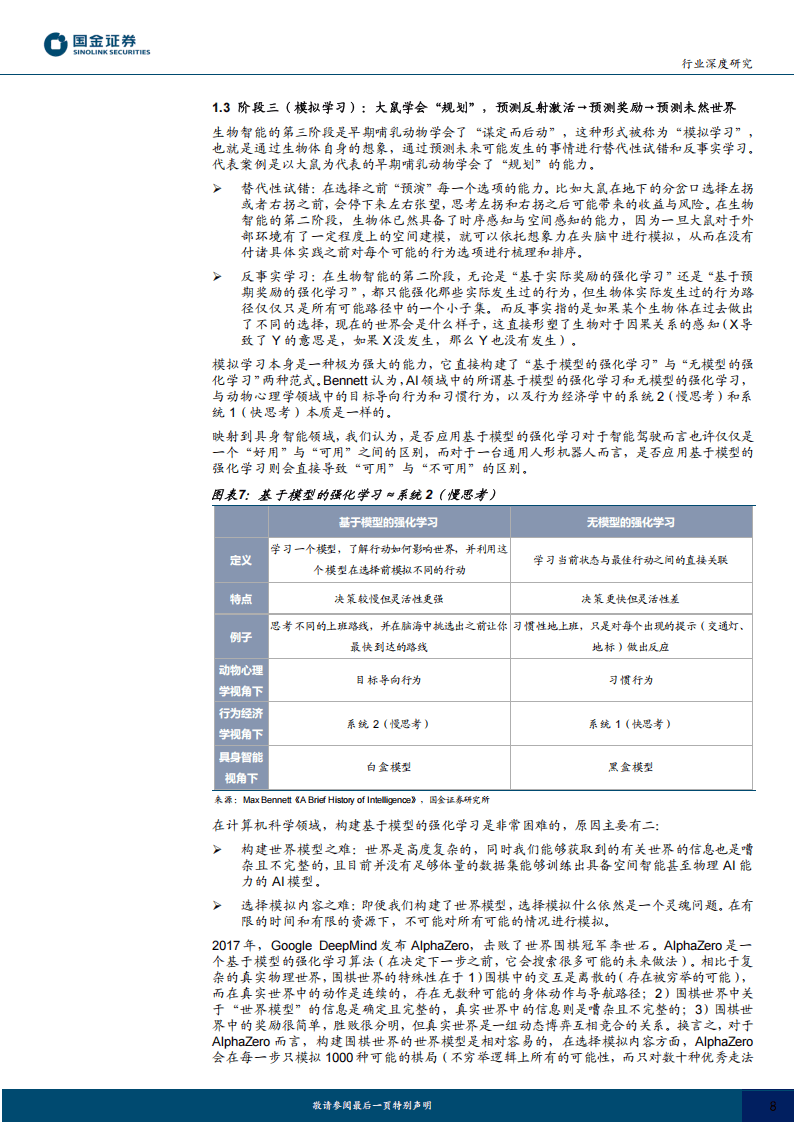
智能驾驶技术的发展为具身智能提供了重要借鉴。以特斯拉FSD为例,其技术路径从早期的模块化架构,逐步演进至基于BEV(鸟瞰图)与OCC(占用网络)的端到端模型。这一转变使机器能够从2D图像中构建3D空间认知,初步实现“空间智能”。而近年来出现的VLA(视觉语言动作模型)等系统,进一步将“慢思考”机制引入机器决策中,使其具备逻辑推理与反事实学习能力。这种基于模型的强化学习,不仅是智能驾驶“好用”与“可用”的分水岭,更是未来通用机器人能否真正落地的关键。
世界模型融合空间与物理智能,仿真数据成为训练核心
如何让机器理解并适应真实世界的复杂性?答案是构建具备“空间智能”与“物理AI”能力的世界模型。空间智能要求机器能够感知物体之间的几何关系与距离信息,而物理AI则强调机器在与环境交互时需符合真实物理规律。目前,由于互联网缺乏海量3D数据,仿真合成数据成为训练世界模型的主要路径。通过Real2Sim2Real技术,开发者能够在虚拟环境中生成高保真、多样化的交互场景,以低成本、高效率的方式为机器人提供训练素材。英伟达发布的Cosmos平台、光轮智能的可交互物理资产等,均是这一方向的积极尝试。
物理AI破解机器人交互难题,从“避障”到“主动操作”
与智能驾驶“避免物理交互”的目标不同,机器人需主动与外界进行高频、精准的物理互动,如抓取水杯、搬运货物等。这一过程涉及复杂的力反馈与动态控制,要求机器系统严格遵循物理定律。物理AI的诞生,正是为了解决机器人在真实环境中“缺数据、难建模”的痛点。通过高精度仿真与实时感知,物理AI将帮助机器人实现从“行动导航”到“实体操作”的跨越,为其在家庭服务、工业制造等场景的大规模应用奠定基础。
结语:从“感知智能”到“行动智能”,具身智能正迎来爆发前夜
随着空间认知、仿真模拟与物理交互技术的持续突破,具身智能的发展路径愈发清晰。未来,具备模拟学习与规划能力的机器人,将不再局限于预设任务,而是能够在动态环境中自主学习、适应甚至创新。这一转变不仅是技术层面的飞跃,更将深刻影响人类生产与生活的方式。从“线虫转向”到“物理AI”,智能的演化正在机器上重演,而这一次,它的速度远超我们的想象。
展开全文以下为报告节选内容
报告共计: 26页
中小未来圈,你需要的资料,我这里都有!
(红霉素软膏可以涂在包皮上吗))
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)