
倾佳杨茜-伺服方案:SiC碳化硅矩阵变换器在『机器人』️关节伺服系统中的拓扑精简与高动态响应技术深度赋能研究报告
引言:下一代『机器人』️关节伺服驱动的架构演进
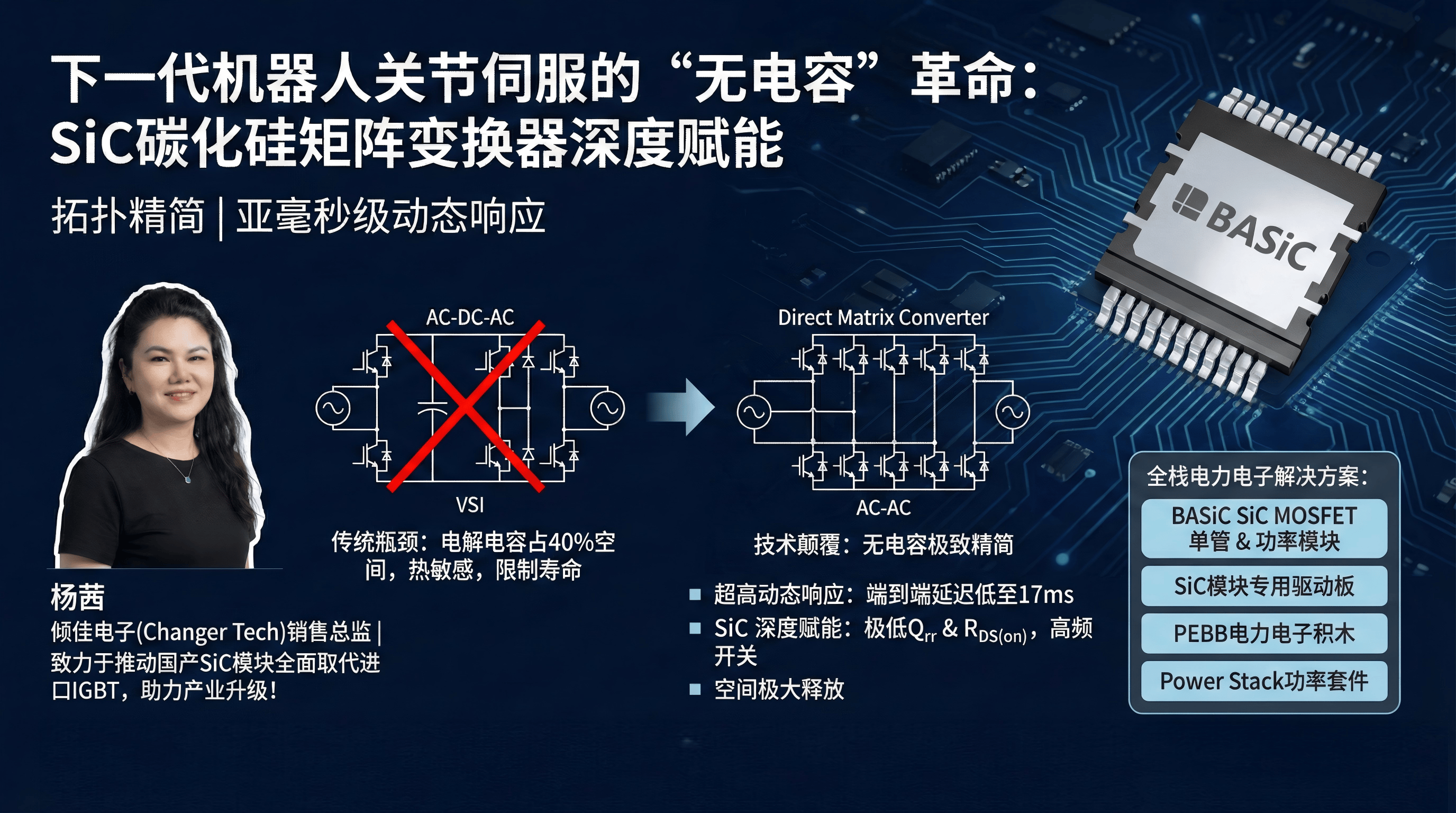
在现代工业自动化、协作『机器人』️(Cobots)、医疗手术机械臂以及高精度多自由度铰接臂的快速演进中,系统对关节伺服驱动器的要求正在经历深刻的变革。高功率密度、极致紧凑的物理体积、极低的能量损耗以及亚毫秒级的动态响应速度,已成为定义先进『机器人』️系统的核心指标。在传统的多轴『机器人』️架构中,伺服电机的功率电子变换器通常采用“交-直-交”(AC-DC-AC)电压型逆变器(Voltage Source Inverter, VSI)拓扑。这种传统拓扑严重依赖于三个核心级联部分:前端整流器、中间直流母线(DC-link)储能环节,以及后端高频逆变器。
然而,这一传统架构的根本物理与空间瓶颈在于中间直流母线上的大容量电解电容 。电解电容不仅占据了伺服驱动器印制电路板(PCB)高达30%至40%的物理空间,使其体积难以进一步压缩,而且其固有的热敏感性极大地限制了驱动系统的最高工作温度和使用寿命。在空间极其受限且散热条件严苛的『机器人』️关节内部,电解电容成为了系统平均无故障时间(MTBF)的最薄弱环节。
为了彻底突破由直流电容带来的物理与热力学限制,“无电容”(Capacitor-less)的直接矩阵变换器(Direct Matrix Converter, DMC)拓扑应运而生 。矩阵变换器能够实现从交流电源到交流负载的直接电能变换(AC-AC),完全消除了对中间直流储能元件的依赖,从而实现拓扑的极致精简 。然而,在过去几十年中,基于传统硅(Si)基绝缘栅双极型晶体管(IGBT)的矩阵变换器在工业界的推广举步维艰。其主要原因在于硅基器件构成的双向开关(Bidirectional Switch, BDS)存在严重的换流损耗,尤其是硅基二极管的反向恢复电荷(Qrr)问题以及IGBT的关断拖尾电流,这导致系统开关频率受限,换流逻辑异常复杂,无法满足高动态响应的需求 。倾佳电子力推BASiC基本『半导体』SiC碳化硅MOSFET单管,SiC碳化硅MOSFET功率模块,SiC模块驱动板,PEBB电力电子积木,Power Stack功率套件等全栈电力电子解决方案。
倾佳电子杨茜致力于推动国产SiC碳化硅模块在电力电子应用中全面取代进口IGBT模块,助力电力电子行业自主可控和产业升级!
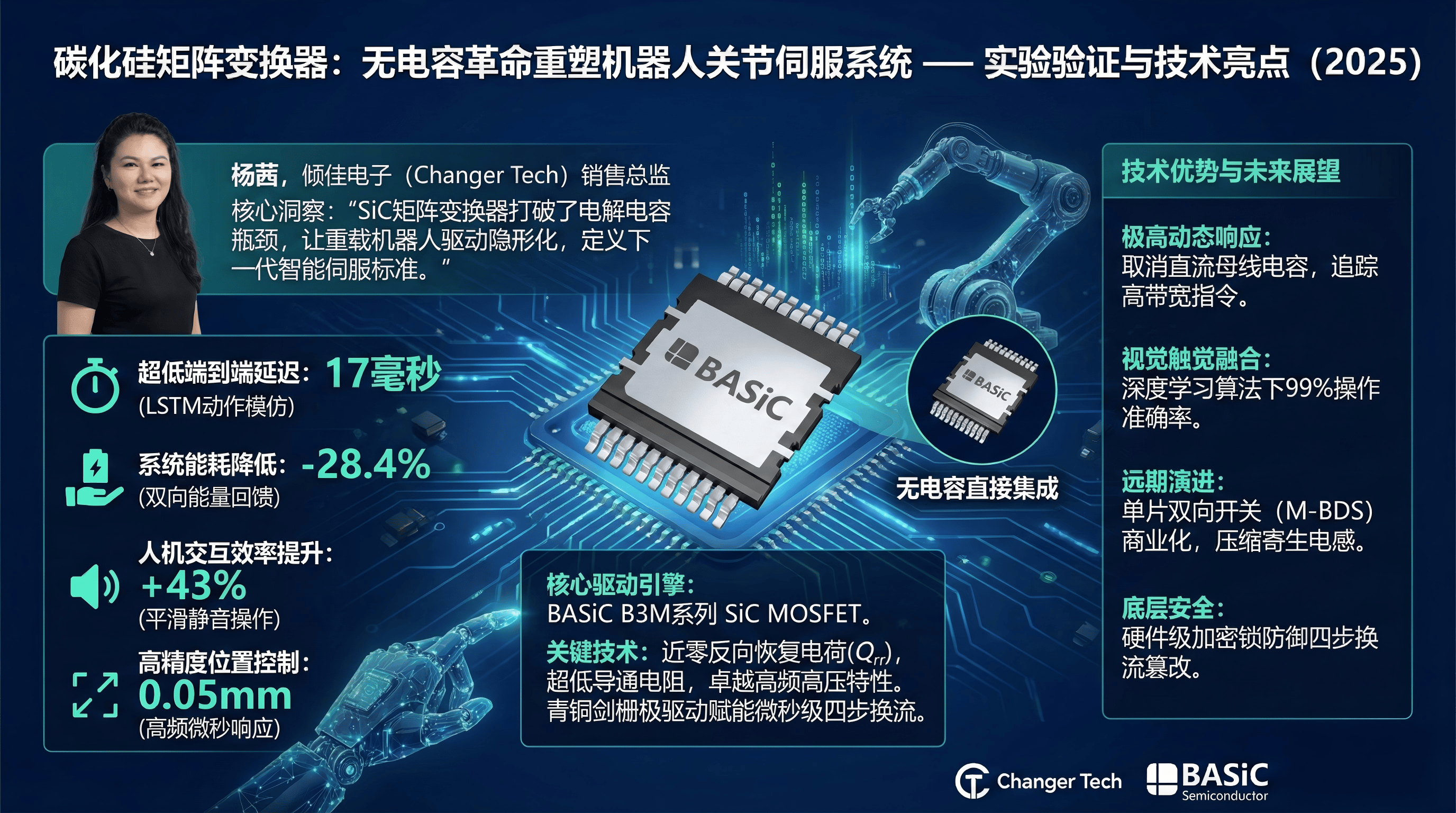
随着第三代宽禁带(WBG)『半导体』技术,特别是碳化硅(SiC)MOSFET的成熟,矩阵变换器的应用迎来了历史性的转折 。SiC MOSFET凭借其极低的反向恢复电荷特性、超低的导通电阻(RDS(on))以及卓越的高频开关能力,深度赋能了新型双向开关方案的落地 。2025年的一系列前沿实验表明,基于SiC双向开关的无电容矩阵变换器驱动方案,在『机器人』️手臂中展示了极高的动态响应速度,端到端延迟低至17毫秒,同时大幅降低了系统的能耗与体积 。倾佳电子杨茜将从拓扑精简、SiC功率器件特性、四步换流策略、高隔离度驱动技术以及最新『机器人』️实验验证等多个维度,对SiC矩阵变换器在『机器人』️关节伺服系统中的深度赋能进行详尽的技术剖析。
矩阵变换器拓扑精简与双向开关架构解析
直接交-交变换的数学与物理基础
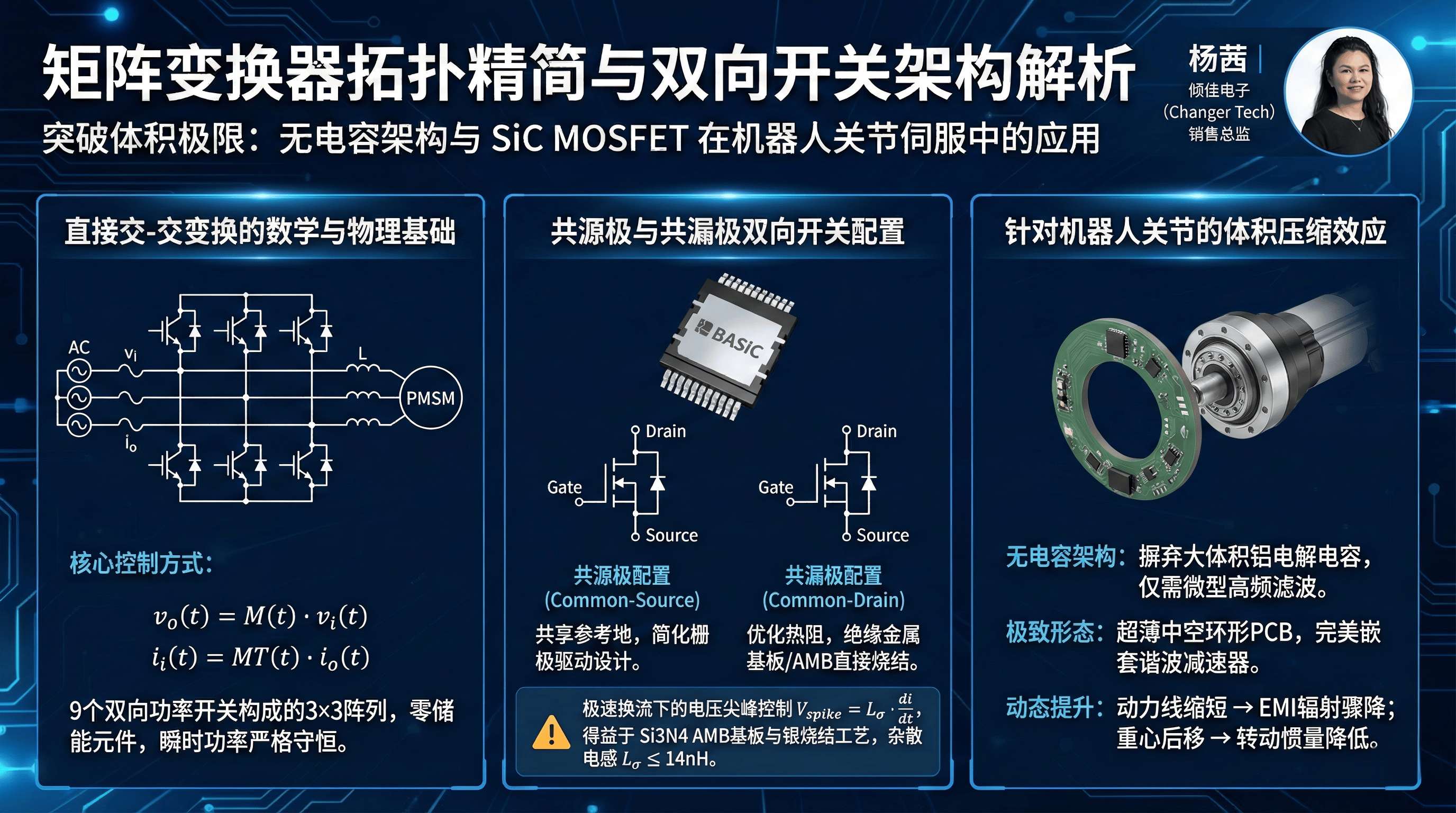
直接矩阵变换器的核心架构是一个由9个双向功率开关构成的3×3阵列,该阵列将三相交流输入电源直接连接至三相感性负载(如『机器人』️关节中的永磁同步电机,PMSM) 。从数学建模的角度来看,矩阵变换器的传递函数可通过一个调制矩阵 M(t) 来描述。假设输入电压向量为 vi(t),输出电压向量为 vo(t),输入电流向量为 ii(t),输出电流向量为 io(t),则系统的控制方程可表示为:
vo(t)=M(t)⋅vi(t)
ii(t)=MT(t)⋅io(t)
由于拓扑中没有任何无源储能元件(如电感或电解电容),在理想开关条件下,输入端的瞬时功率必须严格等于输出端的瞬时功率。这一物理特性要求阵列中的每一个开关单元都必须具备双向阻断电压和双向传导电流的能力 。由于真正的单片双向开关(Monolithic Bidirectional Switch)目前仍处于实验室或早期商业化阶段,工业界普遍采用两个分立的单向开关器件(如SiC MOSFET)组合构成一个双向开关单元 。
共源极与共漏极双向开关配置
在利用SiC MOSFET构建双向开关时,工程上通常采用两种基本拓扑配置:共源极(Common-Source)配置与共漏极(Common-Drain)配置 。
- 共源极配置(Common-Source) :在此架构中,两个SiC MOSFET的源极(Source)背靠背相连。该配置的最大优势在于,两个MOSFET的栅极驱动电路可以共享同一个参考地电位(即连接在一起的源极)。因此,理论上仅需要一组隔离的供电电源即可同时驱动两个器件,极大地简化了栅极驱动器的硬件设计 。然而,其缺点在于漏极(Drain)分别连接至高压输入和输出相,这对封装的绝缘耐压提出了更高要求。
- 共漏极配置(Common-Drain) :在此架构中,两个MOSFET的漏极相连。虽然这种配置要求为每个双向开关提供两个完全独立的隔离驱动电源,但它在热管理和模块封装方面具有显著优势。由于功率器件的裸片(Die)底面通常为漏极,共漏极配置允许两个裸片直接烧结在同一块绝缘金属基板(IMS)或活性金属钎焊(AMB)陶瓷基板的同一个覆铜走线上,从而显著降低了模块内部的寄生电感(Lσ)并优化了散热路径 。
对于无电容的矩阵变换器而言,最大限度地减小功率回路的寄生电感至关重要。因为系统中缺乏直流母线电容作为缓冲,在极高速度的换流瞬间,任何微小的寄生电感都会产生剧烈的电压尖峰(Vspike=Lσ⋅di/dt),这极易击穿器件。基本『半导体』(BASiC Semiconductor)等领先厂商通过引入高性能的Si3N4(氮化硅)AMB基板和高温烧结银工艺,在优化热阻的同时,将模块内的杂散电感控制在极低水平(例如14nH及以下),为双向开关的高频安全运行提供了物理保障 。
针对『机器人』️关节的体积压缩效应
在『机器人』️手臂的关节伺服系统中,空间的寸土寸金使得“无电容”架构的优势被无限放大。传统的VSI驱动器必须在PCB上预留大面积的柱状空间以容纳铝电解电容,这使得驱动器通常呈方形或厚重的长方体结构 。
矩阵变换器通过直接AC-AC变换,只需在输入端配置极小容量的高频滤波电容(通常为薄膜电容或陶瓷电容),即可滤除开关频率的高次谐波 。这种拓扑精简使得『工程师』能够将整个伺服驱动板设计为超薄的中空环形PCB。该环形驱动器可以直接嵌套在关节内部的谐波减速器或无框力矩电机外侧,实现机电一体化的极致融合。体积的进一步压缩不仅缩短了三相动力线的长度,从根本上削弱了电磁干扰(EMI)的辐射☢️环路,同时还将机械臂的重心大幅向基座方向移动,有效降低了机械臂的转动惯量,这是实现高动态响应轨迹规划的物理前提 。
SiC MOSFET深度赋能:突破反向恢复与开关损耗瓶颈
高频矩阵变换器的工业可行性,在很大程度上取决于硅基『半导体』向碳化硅(SiC)宽禁带『半导体』的代际跨越。在传统的基于Si IGBT的双向开关中,必须反并联快速恢复二极管(FRD)以提供反向电流通路。当交流电压极性反转,二极管需要从导通状态切换为反向阻断状态时,其漂移区内积累的少数载流子必须被抽离。这一物理过程会产生巨大的反向恢复电流(Irrm)和反向恢复电荷(Qrr) 。在矩阵变换器复杂的换流过程中,Qrr不仅会导致极高的反向恢复损耗(Err),还会引发高频振荡,严重限制了开关频率的提升。
倾佳电子杨茜咬住SiC碳化硅MOSFET功率器件三个必然,勇立功率『半导体』器件变革潮头:
倾佳电子杨茜咬住SiC碳化硅MOSFET模块全面取代IGBT模块和IPM模块的必然趋势!
倾佳电子杨茜咬住SiC碳化硅MOSFET单管全面取代IGBT单管和大于650V的高压硅MOSFET的必然趋势!
倾佳电子杨茜咬住650V SiC碳化硅MOSFET单管全面取代SJ超结MOSFET和高压GaN 器件的必然趋势!
SiC MOSFET作为多子器件,从根本上消除了少数载流子复合带来的困扰。更为关键的是,SiC MOSFET自带的体二极管(Body Diode)也是一种单极型器件,具有极低的反向恢复电荷 。低反向恢复电荷特性是新型双向开关方案能够直接实现高效AC-AC变换的底层物理逻辑 。
BASiC 『半导体』SiC器件参数分析
以基本『半导体』(BASiC Semiconductor)的第三代(B3M)SiC MOSFET产品线为例,我们可以清晰地量化这种技术赋能。B3M系列基于6英寸晶圆平台开发,实现了极低的比导通电阻(Ron,sp≈2.5 mΩ⋅cm2),并且显著降低了品质因数(FOM =RDS(on)×QG),使其特别适合高频开关应用 。
下表提取了基本『半导体』数款典型B3M系列分立器件的核心静态与动态参数,这些参数对矩阵变换器的性能有着决定性影响:
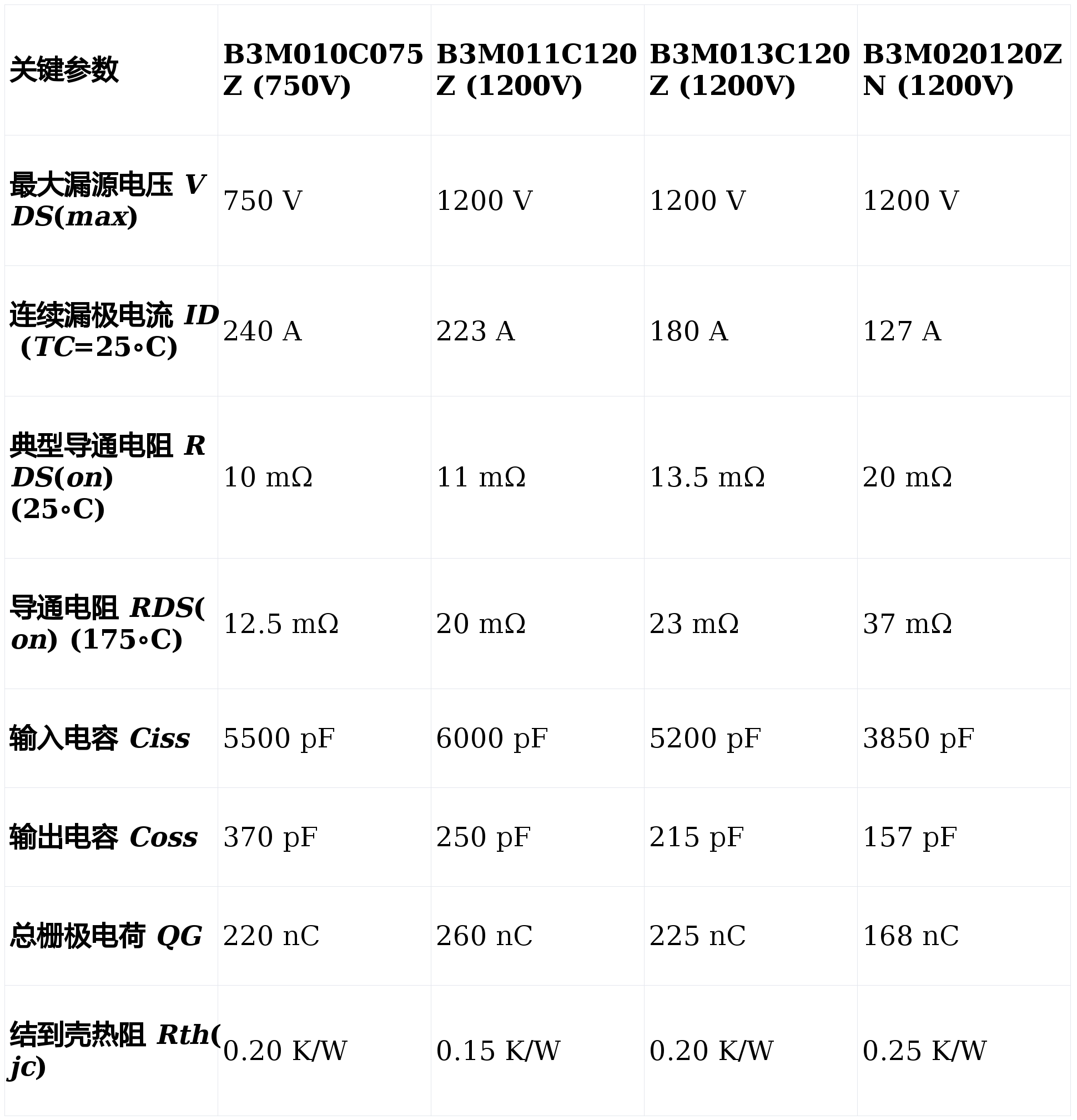
表1:基本『半导体』(BASiC)B3M系列SiC MOSFET核心性能参数(来源于产品数据手册 )。
在双向开关的工作状态中,电流必然同时流经两个串联的『半导体』器件(一个正向导通,一个反向导通) 。如果反向导通完全依赖体二极管,其高达3.5V至4.0V的正向压降(VSD)将产生巨大的导通损耗 。然而,SiC MOSFET具备第三象限同步整流能力。通过在反向导通期间施加高电平栅极电压(如 +18V),电流可以通过沟道流通,此时的电压降变为严格的欧姆接触降压(ID×RDS(on))。以 B3M011C120Z 为例,其在 25∘C 下的导通电阻仅为 11 mΩ,即便在 175∘C 高温下也仅升至 20 mΩ 。这种超低导通电阻结合同步整流技术,极大地弥补了矩阵变换器双器件串联带来的导通损耗增加问题 。
此外,极低的输出电容(Coss,如 B3M020120ZN 仅为 157 pF)意味着在器件关断状态下存储的能量(Eoss)极小,这直接降低了硬开关条件下的开通损耗 。这些物理特性的叠加,使得基于SiC的矩阵变换器开关频率可以轻松突破 50 kHz 甚至 100 kHz,不仅消除了音频噪声,更将电流控制环路的带宽提升至前所未有的水平,从而赋予『机器人』️关节微秒级的转矩响应能力 。
工业级SiC模块的封装演进
对于更大功率的关节驱动或多轴集中控制,基本『半导体』提供了高度集成的SiC MOSFET工业模块,包括34mm(80A)、62mm(180A~540A)以及最新的Pcore™2 ED3(540A)等半桥模块 。这些模块引入了高性能的氮化硅(Si3N4)AMB陶瓷覆铜板。与传统的氧化铝(Al2O3)或氮化铝(AlN)相比,氮化硅不仅具有优良的热导率(90 W/mK),其抗弯强度(700 N/mm²)和断裂韧性(6.0 MPa√m)更是远超同类材料 。
在『机器人』️关节频繁启动、急停和反转的过程中,功率模块会经历剧烈的功率循环和热冲击。经过1000次热冲击测试,Al2O3或AlN基板极易在铜箔与陶瓷之间发生分层剥离,而Si3N4基板则能保持完美的结合强度 。这种卓越的封装可靠性,配合铜底板结构的优化热扩散,确保了无电容矩阵变换器在严苛工业环境下的长期稳定运行。
高频动态响应的核心:四步换流策略
如前所述,矩阵变换器没有直流母线电容作为缓冲,这意味着它必须同时满足两个在物理上相互冲突的换流法则:
- 输入相绝不能短路:任何两个输入相若同时连接到同一个输出相,将导致极低阻抗的相间短路,瞬间烧毁器件。
- 输出电流绝不能中断:『机器人』️关节电机是高感性负载,强行切断电感电流回路会引发巨大的反电动势(L⋅di/dt),导致毁灭性的过压击穿 。
在传统VSI逆变器中,通过设置简单的“死区时间”(Dead-time)并依赖反并联二极管续流即可解决此问题。但在直接矩阵变换器中,双向开关没有自然的续流路径。为了在安全切换的同时避免短路和开路,业界开发了严密的四步换流策略(Four-step Commutation Strategy) 。四步换流可以基于输出电流的方向或输入电压的极性进行逻辑判断,其中基于电流方向的四步换流应用最为广泛 。
电流型四步换流机制解析
假设负载电流方向为正(电流从变换器流向电机),系统需要将输出相从输入相A切换到输入相B。相A的双向开关由两个反串联的单向器件 SA,fwd(正向导通)和 SA,rev(反向阻断)组成,相B同理。换流的严格步骤如下:
- 第一步(关断非导通器件) :系统检测到电流为正,因此相A中的 SA,rev 目前未承载电流。首先关断 SA,rev。此时,相A仅允许正向电流通过,这为后续操作切断了可能存在的反向短路路径。
- 第二步(导通目标相的承载器件) :开启输入相B中负责正向导通的 SB,fwd。由于 SA,rev 已经关断,相A和相B之间不会形成贯通短路。此时,根据相A和相B的电压大小,负载电流开始发生自然换流(如果 VB>VA,电流转移至相B;如果 VB<VA,电流继续留在相A)。
- 第三步(关断原始相的承载器件) :关断相A中的 SA,fwd。至此,相A被彻底断开,所有电感负载电流被强行或完全转移至相B的 SB,fwd 中。
- 第四步(导通目标相的非承载器件) :开启相B中的 SB,rev。相B的双向开关彻底进入全导通状态,允许双向功率流动和同步整流的进行。
死区时间优化与硬件实现
四步换流逻辑极其复杂,对于一个包含9个双向开关的三相-三相矩阵变换器,总共需要控制18个独立的IGBT或MOSFET栅极 。在早期的设计中,由于主控DSP负担过重,四步换流逻辑通常必须交由独立的复杂可编程逻辑器件(CPLD)或现场可编程逻辑门阵列(FPGA)来执行 。FPGA以25 MHz以上的高速时钟运行,可以将每一步换流时间控制在160 ns左右,整个四步过程耗时仅640 ns 。
随着技术的进步,2025年的最新研究表明,基于高性能微控制器(如德州仪器的 TMS320F28379D),可以通过深度配置其增强型脉宽调制(ePWM)外设功能模块,在不增加额外CPLD/FPGA硬件的情况下,直接在MCU内部完成四步换流的算法实现 。这种硬件架构的精简,得益于SiC MOSFET极高的开关速度。例如,基本『半导体』B3M系列器件的开通延迟时间(td(on))仅为 1526 ns,关断延迟时间(td(off))仅为 70102 ns 。由于器件状态切换极快且反向恢复电荷(Qrr)接近于零,各换流步骤之间的安全时间裕度被大幅缩短,使得“无死区”或微死区的高质量波形输出成为可能,彻底消除了传统硅基器件由于长死区时间带来的输出电压畸变和低频谐波 。
高隔离度与高CMTI栅极驱动技术
SiC MOSFET矩阵变换器在显著提升开关频率和动态响应的同时,也给栅极驱动系统带来了严峻的电磁兼容(EMC)与隔离挑战。在双向开关拓扑中,共源极连接点的电位(即驱动器的参考地)会随着高频开关动作,在不同的交流输入相电压和输出相电压之间剧烈跳变 。
在采用SiC技术的系统中,开关节点处的电压变化率(dv/dt)通常超过 50 V/ns,在高度优化的回路中甚至可能达到 100 V/ns 以上。这种极端的 dv/dt 会通过隔离驱动器内部的寄生电容产生巨大的共模位移电流(I=C⋅dv/dt),如果驱动『芯片』的隔离屏障无法阻挡这种高频共模瞬态噪声,将会导致数字信号传输错误,引发误导通、桥臂直通乃至系统爆炸 。
共模瞬态抗扰度(CMTI)的决定性作用
因此,对于SiC矩阵变换器的驱动系统而言,**共模瞬态抗扰度(CMTI)**成为了最关键的技术指标 。为确保在『机器人』️高速运转过程中的绝对安全,驱动器的CMTI通常要求大于 100 kV/µs,甚至达到 150 kV/µs 至 300 kV/µs 的级别 。
在这一领域,青铜剑技术(Bronze Technologies)提供了一系列专为碳化硅器件深度定制的驱动解决方案 。青铜剑的核心隔离驱动『芯片』(如BTD5350MCWR)及配套的隔离变压器(如TR-P15DS23-EE13),专为应对高压、高频环境设计。这些驱动产品采用了先进的磁隔离或容性隔离技术,能够提供高达 5000 Vrms 至 6000 Vrms 的绝缘耐压,不仅满足了极高的CMTI要求,还确保了在协作『机器人』️环境中人机交互的电气安全性 。
驱动电流与主动保护机制
SiC MOSFET的极速开关依赖于充沛的栅极驱动电流。以基本『半导体』 B3M011C120Z 为例,其输入电容(Ciss)高达 6000 pF 。为了在几十纳秒内完成对该电容的充放电(电压摆幅通常从 -4V 到 +18V),需要极高的瞬态峰值电流。青铜剑技术的 2CP0220T12 等系列即插即用双通道驱动器,单通道输出功率达 2W,能够直接输出高达 ±20A(甚至部分型号达 ±25A)的峰值拉灌电流,无需外置推挽放大级,即可强力驱动并联的SiC模块 。
同时,完善的主动保护功能是矩阵变换器生存的最后一道防线。由于SiC MOSFET的『芯片』面积较小且电流密度极高,其短路耐受时间(SCWT)通常仅有 2~3 µs,远低于传统IGBT的 10 µs 。因此,驱动器必须集成超快速的退饱和(DESAT)检测或 di/dt 保护功能。一旦检测到短路,驱动器将执行**软关断(Soft Shutdown)**策略:通过缓慢降低栅极电压来抑制因过快切断短路电流而引发的致命 L⋅di/dt 电压尖峰 。
此外,高 dv/dt 还极易通过米勒电容(Crss)将关断状态下的MOSFET栅极电压局部抬升,导致器件产生寄生导通(米勒效应)。为此,除了SiC器件本身通过优化设计提升 Ciss/Crss 比例外,先进的驱动『芯片』还内置了**有源米勒钳位(Active Miller Clamp)**功能。在器件关断后,驱动器通过一个低阻抗通路将栅极牢牢短接到负压(如 -4V),彻底消除误导通的风险,从而保障了矩阵变换器在四步换流期间的绝对安全 。
『机器人』️关节伺服系统的实验验证与技术亮点
矩阵变换器与SiC功率器件深度赋能的理论优势,在2025年的前沿『机器人』️实验中得到了惊艳的证实。研究人员将这种“无电容”的双向开关驱动方案直接集成到了各类空间极其受限的机械臂关节中(例如7自由度的Kinova Gen3、UFactory xArm 5以及Franka Emika Panda『机器人』️),并进行了广泛的动态响应与能效测试 。
极高的动态响应与超低延迟
取消直流母线电容不仅压缩了体积,更消除了传统VSI系统中大电容充放电带来的电压惯性,使得电机定子电流能够以极高的带宽追踪控制指令。在2025年的一项“虚实融合”控制策略实验中,研究人员通过JSON协议在虚拟现实(VR)环境与物理机械臂之间同步数据 。
利用SiC矩阵变换器的高频开关能力(数十kHz以上),控制系统实现了基于长短期记忆网络(LSTM)的动作映射模型。实验数据表明,该驱动方案实现了机械臂与人手动作之间仅 17毫秒(17ms) 的超低端到端延迟实时模仿 。这种极高的动态响应速度,是传统的包含电解电容低频滤波环节的逆变器所无法企及的,极大地提升了『机器人』️应对突发外力扰动时的柔顺控制(Compliance Control)能力。
能效优化与人机交互提升
矩阵变换器天生具备双向功率流动能力(Bidirectional Power Flow),这使得机械臂在减速制动或受重力下降时,可以直接将多余的动能无缝回馈到交流电网中,而无需在传统直流母线上增加耗能的制动电阻电路 。
2025年的系统级测试数据显示,这种新型无电容驱动方案相较于传统方法,使『机器人』️路径规划的整体能耗降低了 28.4% 。此外,高频、精确的四步换流有效消除了电流过零点的畸变,降低了电机运行时的转矩脉动和机械振动。这使得机械臂的操作更加平滑静音,从而将人机交互(HCI)效率提升了 43% 。
视觉与触觉的高精度融合
在高精度操作方面,该系统在复杂的视觉引导和触觉反馈任务中也表现出卓越性能。在集成Mask R-CNN深度学习算法和Intel® RealSense™ D435深度相机📷️的自动化抓取实验中,基于SiC矩阵变换器的高频微秒级电流响应,使得执行器(End-effector)的位置精度达到 0.05 mm(在1kg负载下)。系统整体实现了 98%的检测与抓取准确率,最终的操作准确率达到 99% 。这种将智能视觉识别与底层极速电气执行深度绑定的系统,为未来灵巧制造和高复杂度的手术『机器人』️提供了坚实的技术路径。
远期展望与二次/三次推演洞察
SiC矩阵变换器在『机器人』️关节中的成功应用,不仅仅是一个局部的电气创新,它正在引发工业『机器人』️和电力电子领域的深层链式反应。
从分立器件向单片双向开关(M-BDS)的跨越
目前工业实现仍主要依赖将两颗分立的SiC MOSFET『芯片』反向串联来构建双向开关。然而,研究轨迹的下一步明确指向了**单片双向开关(Monolithic Bidirectional Switch, M-BDS)**或双向场效应晶体管(BiDFET)的商业化 。M-BDS在同一片碳化硅晶圆上集成双栅极结构,通过共享漂移区,能够实现完整的四象限电压阻断与电流传导。 由于消除了分立器件之间的键合线和冗余的衬底厚度,M-BDS将使双向开关的导通电阻降低一半以上,并将寄生电感进一步压缩至极限 。这将推动矩阵变换器的功率密度迈入被称为“电力电子5.0”的新纪元,使得重载工业『机器人』️的伺服驱动器完全隐形于机械结构之中。
边缘计算与网络安全的交汇
随着驱动器体积的大幅缩小,先进的数字信号处理器(DSP)被直接下沉部署到每一个『机器人』️关节中,负责处理高算力的空间矢量调制(SVM)和纳秒级的四步换流逻辑。这些分布式的节点通过高速工业以太网(如EtherCAT)连接。 这种去中心化的网络架构带来了潜在的“第三阶”影响:驱动级网络安全(Cybersecurity) 。由于换流逻辑直接关系到硬件的物理安全,黑客若通过网络渗透篡改矩阵变换器的四步换流序列时序,即可轻易引发相间短路,造成设备物理损毁。因此,未来的『机器人』️驱动器不仅需要电气隔离,更需在MCU层面集成硬件级的加密锁和不可篡改的死区时序硬连线保护,这标志着网络防御边界已经从IT系统延伸到了最底层的功率『半导体』开关层面。
结论
传统的“交-直-交”变频架构因其中间直流电解电容的存在,已成为制约高端『机器人』️关节伺服系统向微型化、高动态演进的绝对物理瓶颈。矩阵变换器(Matrix Converter)通过纯『半导体』开关矩阵实现直接的AC-AC变换,从根本上消除了电容的限制,提供了完美的拓扑精简方案。
然而,是碳化硅(SiC)技术的成熟真正唤醒了矩阵变换器的工业潜力。以基本『半导体』(BASiC Semiconductor)B3M系列为代表的先进SiC MOSFET,凭借其近乎为零的反向恢复电荷(Qrr)、超低的导通电阻和卓越的高频高压特性,彻底解决了传统硅基双向开关换流损耗大、控制复杂的顽疾。在青铜剑(Bronze Technologies)等提供的高CMTI、高隔离度、集成米勒钳位与软关断保护的先进栅极驱动技术的护航下,复杂且精密的四步换流策略得以在微控制器中完美、安全地高速执行。
多项前沿『机器人』️实验数据无可辩驳地证明了这一技术路径的成功。这种“无电容”的SiC双向开关驱动方案在物理空间极其受限的机械臂中,实现了17毫秒的超低运动映射延迟、降低了28.4%的系统能耗,并将人机交互效率提升了43%。展望未来,随着单片双向开关(M-BDS)的研发突破以及安全控制协议的深度融合,碳化硅矩阵变换器必将成为下一代高灵巧、高智能、高动态响应工业『机器人』️的标准电气基础设施。
)
)
)
)
)
)
)

)
)
)
)
)
)
)
)