
2025年被业界定义为人形『机器人』️的"规模化量产元年"。以上海财经大学数字经济研究院发布的《人形『机器人』️生态报告2025》为标志,优必选、宇树科技、特斯拉、Figure AI等企业规模产线建成投产,头部企业实现千台级交付 。2026年,产业正从"技术验证期"向"规模化商用期"快速过渡,全球具身智能市场规模预计达195.25亿元,其中我国市场占比近半 。

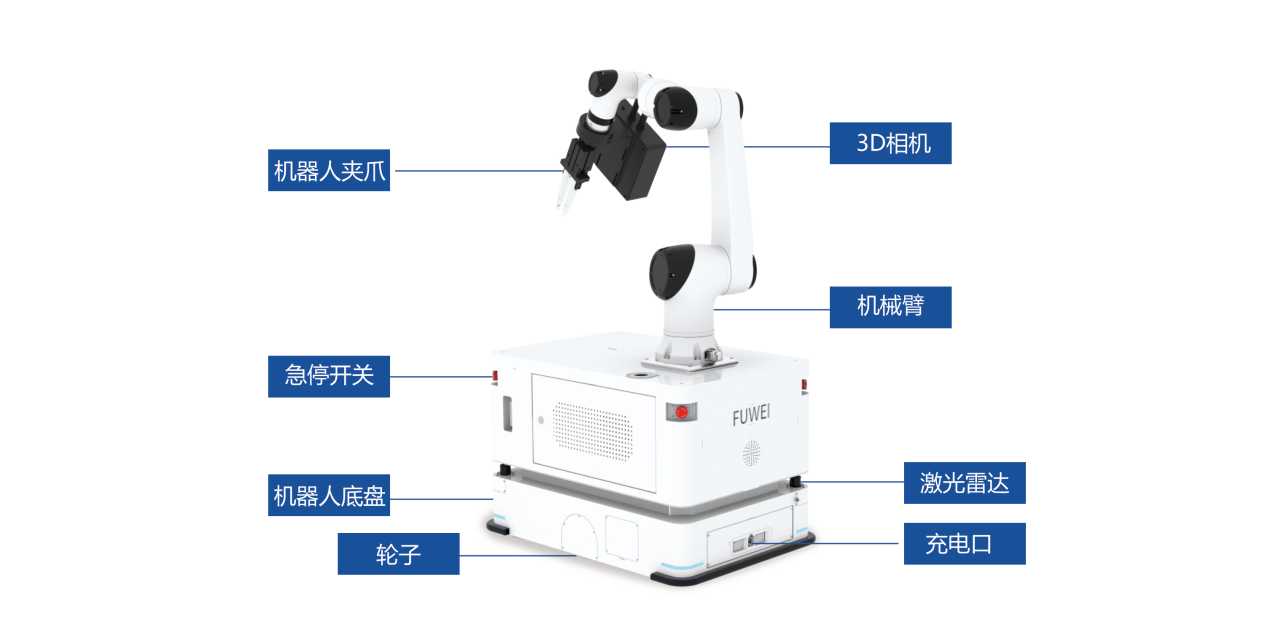
在这一轮产业变革中,智能复合『机器人』️作为融合移动底盘、协作机械臂与智能决策系统的新型装备,正成为连接人形『机器人』️技术与工业落地场景的关键桥梁。其"眼(视觉)、脑(控制)、手(臂)、脚(底盘)"的协同能力,为柔性制造、智慧物流等领域提供了可量化回报的解决方案 。
一、权威学术突破:四大核心技术重塑人形『机器人』️能力边界
1.1 跨本体全身控制:XHugWBC框架与零样本迁移
2026年2月,arXiv发表的最新研究《Scalable and General Whole-Body Control for Cross-Humanoid Locomotion》提出了XHugWBC框架,这是一个创新的跨本体训练框架,通过物理一致形态随机化与语义对齐的观测-动作空间设计,实现了单一策略在12种仿真人形『机器人』️和7种真实『机器人』️上的零样本泛化。该研究证明:通用控制器可以摆脱『机器人』️特定训练,为跨平台部署奠定理论基础 。
1.2 仿人全身控制:多目标优化与QP求解
哈尔滨工业大学在《Biomimetics》期刊发表的研究《Human-Inspired Holistic Control for Mobile Humanoid Robots》提出了一种基于多目标优化的仿人全身控制方法。该方法将移动底盘、腰部、双臂自由度统一为严格凸二次规划(QP)问题求解,引入分层权重分配策略,在双轴搬运与轴孔装配任务中验证了平滑、类人的运动生成能力。这是首次将仿人运动特征以数学约束形式嵌入优化框架 。
1.3 人机接口革命:无『机器人』️示范的全身操作学习
Semantic Scholar收录的最新研究《Humanoid Manipulation Interface》提出了一种无需『机器人』️即可完成数据采集的全身操作学习框架。通过将人类运动映射为『机器人』️可执行的全身技能,该框架显著降低了示教数据的采集成本,为人形『机器人』️的规模化数据训练提供了可行路径 。
1.4 具身智能进化:从单体智能向群体智能演进
《人形『机器人』️生态报告2025》指出,具身智能体之间的关系正从单体智能向智能协作、群体智能演进。多台『机器人』️乃至异构『机器人』️之间的无干预协作已取得突破,尽管自主行动与多任务能力仍有限,但群体智能的架构雏形已经显现 。
二、产业落地验证:从实验室到工厂的ROI实证
2.1 汽车制造:焊装车间柔性重构
案例背景:某华东汽车厂在车型切换周期中,因固定工位与传送线约束,换型时间平均90分钟,单日损失产能12%-18%。
解决方案:部署8台智能复合『机器人』️,搭载六轴机械臂与视觉定位系统,采用全域调度与动态优先级算法。
2.2 3C电子:精密装配与检测
案例背景:某消费电子企业每周SKU频繁更新,人工插拔测试与搬运导致返修率达2.6%。
解决方案:配置12台复合『机器人』️,实现工位间移动、治具识别、自动插拔测试与追溯,通过力控与视觉纠偏将插拔精度控制在±0.05mm。
微小件抓取专项:在CNC加工单元,艾利特智能复合『机器人』️通过2.5D视觉系统实现0.3mm微小件抓取,良率从85%提升至99.5%,单单元日产能从5000件增至8000件,换型时间<10分钟 。
2.3 仓储物流:人机协作与效率提升
案例背景:某医药仓储中心波次拣选中,人工搬运距离长、订单峰谷差大。
解决方案:复合『机器人』️承担货到人拣选搬运,动态规划最佳路径,配合拣选工位可视化引导与称重校验。

)
)
)
)
)
)
)
)
)
)
)
)

)
)
)